| |
|
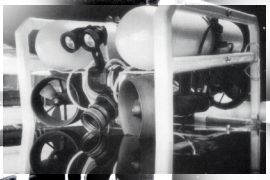
 A lightweight
CORAL AT ROV design is based on experience and developments
achieved during successful CORAL ROV research and development
project. The CORAL AT ROV system is an example of a
system which incorporates latest and the most effective
developments in the ROV technology. A lightweight
CORAL AT ROV design is based on experience and developments
achieved during successful CORAL ROV research and development
project. The CORAL AT ROV system is an example of a
system which incorporates latest and the most effective
developments in the ROV technology.
Those include:
- fiber optic data transmission
- miniature high sensitivity S-VHS u/w TV camera
- powerful brushless permanent magnets DC thrusters
- reliable GESPAC computer system
- composite frame and pressure vessels
Modular design and open architecture allows customer
tailored modification to cope with different operational
needs. Scientific and light work manipulative tasks
could be performed using different tools and sensors.
Three different thruster configurations are available.
Due to an open frame design of the CORAL AT ROV the
system could easily be equipped with standard ROV tools.
Their integration with the ROV system is fast due to
application of a flexible and easily programmable computer
control system.
The list of optional equipment could include:
- ROV manipulator
- Pan TV camera unit
- still camera c/w strobe
- ROV omnidierctional sonar - TRITECH ST 325, ST 525
or 725
- Hydroacoustic profiler - TRITECH ST 1000
- Precision echosounder - TRITECH ST 150 or ST 975
- Surface control unit - TRITECH SCU 3
- Ultrasonic thickness meter
- Corrosion potential meter
- U/W navigation system transponder
- Side scan sonar
- Doppler velocity meter
- Sea environment monitoring sensor (hydrocarbons,
nutrients etc.)
|
|
In case of all questions regarding integration
of a customer specified ROV's equipment contact manufacturer.
The standard CORAL AT400 ROV system consists of:
- CORAL AT vehicle
- Neutrally buoyant umbilical and storage real
- Control console
- Cable winch with heavy umbilical, launching crane
- Option
- TMS garage with underwater winch system - Option
|
|
|
|
Specification |
of |
CORAL AT |
|
|
Work depth: 400m |
|
Greater depth available upon request |
|
|
Dimensions - L x B x H: |
|
0.9 x 0.72 x 0.62 m, Standard arrangement |
|
|
Weight: |
|
60 kg |
|
|
Pay load: |
|
10kg |
|
|
Propulsion: |
|
-brushless permanent magnet DC electric motors, 400 W
- 3 blade propellers in a KORT nozzles
- thrust 150N/unit |
|
|
- standard thruster configuration other thruster configurations |
|
5 thruster - 4 horizontal - diamond like, 1 vertical, other pon reqest |
|
|
Mounting frame: |
|
GRP composite and buoyancy foam |
|
|
Control system: |
|
2 computers coupled using fiber optic data transmission link PC-386 compatible GESPAC industrial computer |
|
|
- ROV control |
|
2 proportional joysticks, buttons, keyboard |
|
|
- ROV status |
|
TV monitor or separate computer display Auto-altitude, |
|
|
- Autopilot |
|
Auto-heading |
|
|
Power system: |
|
3 x 380 V/50 Hz, 5 kW |
|
|
Standard equipment: |
|
|
|
|
- 120 degrees tilted
underwater TV ccd camera
|
|
monochromatic 600 tv lines/0.05 lux, color 460 tv lines/4 lux |
|
|
- 2 u/w lights |
|
150 W/24 V |
|
|
- Electronic magnetic compass KVH |
|
Accuracy 0.2° |
|
|
- Echosounder |
|
Resolution 0.1 m (optional 0.01m) |
|
|
- Depth gauge |
|
Resolution 0.2% (optional 0.005%) |
|
|
Umbilical: |
|
diameter 12 mm
length 150 - 500 m
breaking load 10000 N
buoyancy -7 kg/km |
|
|
|
|
|
