| 2010 - |
Scuba hotel, in partnership with Deep Ocean Technology
|
| 1999 - |
Technology of large structures using high
modulus fibres for marine applications. Status: under development
|
| 1999 - |
Self propelled mine destruction
charge Operating depth 400m, Range 500m 2kg destruction
charge. Status: Under development |
| 1999 - 2001 |
ROV pilot computer simulator trainer.
Full scale Pilot console with 8 simulation computers running
simultaneously. Status: prototype built, small series production
considered |
| 1994-2000 |
Mine hunting ROV system. Principal
data : operating depth 200m,operating radius 400m, maximum
horizontal speed 3 knots, payload 50N. Articulating boom
for small charge location |
| 1990-1993 |
Title: Advanced technology ROV.
Status: For experimental use. |
| 1982-1992 |
Title:
CAD program for initial phase design of submersibles,
with reference component data base and simplified high
speed graphics. Status: operational, permanent development |
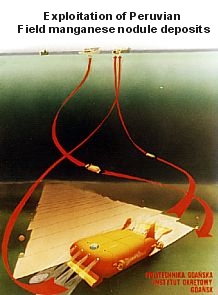
| 1989 |
Title:
Commercial System for Exploitation of Peruvian Field manganese
nodule deposits.
Principal data: annual output: 4.5 mln ton, working depth
3500- 6000m, 6 autonomous submersibles used for vertical
transportation, submersible dry mass: 700Mg, submersible
payload 500Mg of wet nodules vertical propulsion: solid
ballast, horizontal propulsion: solid ballast potential
energy.
Report: PGIO PB/189/89.
|
| 1987 |
Title:
Design,development and construction of Autonomous ROV system
for exploration of manganese nodule deposits. Principal
data: operating depth: 6000m, ROV weight: 3500dN,instrumentation:
-BW/color TV camera, obstacle avoidance sonar, side looking
sonar, robotized manipulator and self balancing sample basket,
payload 50dN, number of ROVs in the system 2+1, communication:
acoustic link. Status: suspended after conceptual design
and cost evaluation.
Report: PGIO PB/89/87, PGIO PB/210/87. |
| 1986-1988 |
Title: Design and development
of a towed body for side looking sonar system
Principal data: operating depth:100m,operating speed: 2-6
knots.
Status: current production.
Report: PGIO PB/2503/86. |
| 1985
-1986 |
Design
and development of Diver Towing Vehicle. Mass 35kg, range
4500m, speed 1m/s. Lead acid battery, DC motor propulsion
Status: Small series of 12 vehicles produced and delivered
in use since 1986 |
| 1985-1990 |
Title:
Design,development and construction of prototype of a
general purpose low cost ROV with launch/recovery and
tether management systems.
Principal data: operating depth: 400m, weight: less than
100dN, instrumentation: TV color camera, scanning sonar,
CP probe, thickness meter,3DOF manipulator. Status: under
development
Reports:PGIO PB/2159/85, PGIO PB/134/cpbr 9.5 153/87,
PGIO PB/96/CPBR 9.5/453/88. |
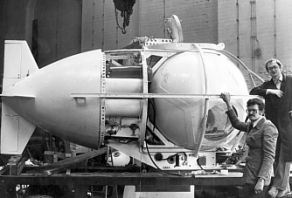
| 1984-1989 |
Title:
Design, development and construction of prototype of Free
Fall, Deep Diving Life Saving Capsule for drilling rigs.
Principal data: number of evacuees 16, operating depth
50m, submergence time 48 hours, positioning: anchor weight.
Status: Prototype built and tested at sea.
Report: PGIO PB/1848/83,PGIO PB/1875/84,PGIO PB/2186/85,
PGIO PB/111/CPBR 9.5/135/87.
|
| 1983-1984 |
Title:
Conceptual project and cost study of High Speed mine hunting
ROV System.Principal data : operating depth 200m,operating
radius 300m, maximum horizontal speed 6 knots, payload
120/240dN.
Report:PGIO PB/1907/84 |
| 1979-1981
|
Title:
Experimental evaluation of spherical shell collapse pressure
calculation algorithms adopted to GRP
composites. Report: PGIO MW/359/81 |
| 1976-1980 |
Title:
Design and development of underwater electrical connectors.Principal
data: operating depth 6000m, maximum voltage: 750V, current:
2-45A
Status: Current production.
Reports: |
| 1975
- 1985 |
Desing of structure
and technology development of GRP hull minesweeper 207/Notec
class.
Status: series of 17 ships built and operational till
now.
|
|
1975-1978 |
Title:
Design, development and construction of prototype of Manned
Submersible Craft for fishery investigations.Principal
data: GRP sandwich pressure hull, operating depth: 200m,crew:
2 persons,main battery:lead-acid 10kWh, self propelled
or towed by fishing trawler.
Status: Delivered to Marine Fishing Institute, Gdynia.
Reports: PGIO PB/905/77,PGIO PB/909/77
|
| 1968-1972 |
Development
of fire resistant life boats for tankers. Second design
of the type in Europe.
Status: Series of open deck life boats produced at Ustka
Shipyard since 1972
|
| 1967
- 1969 |
Stern
trawler TR-18 GRP hull design and technology development.
18m length
Status: Prototype in use since 1969
|
| 1967
- 1969 |
Landing craft MARABUT
design and technology development. GRP hull 25 m length
Status: 4 units built and in use since 1969 |
| 1964-1968 |
Life boats design and
technology development.
Status: Series of open deck life boats produced at Ustka
Shipyard since 1964.
|
|
1963 - 1965 |
Landing boat design
and technology development. 5m length, three layer sandwich
composite structure.
Status: Series production terminated
|